DCモータ速度制御回路 調整 |
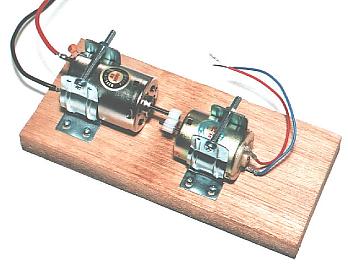 駆動モータとしてはRS-380PH、速度検出用モータにはRE-280を使用しました。両方ともマブチモータ社製です。今回の装置では回転制御試験のためなので、両モータはプラスチックのギアを使用して接続しています。モータの中心をしっかり合わせないとギアがモータのシャフトからはずれることもあるので、注意してください。  今回のモータ回転数制御回路は左図のようなフローで回転数の制御を行います。 今回のモータ回転数制御回路は左図のようなフローで回転数の制御を行います。制御回路では次の3つのパラメータを調整する必要があります。
制御値は change に設定する値で調整します。 制御の周期は CCPR2H と CCP2L レジスタに設定する値で調整します。  検出周期が短く、制御値が大きい場合、モータの回転が高くなったり、低くなったりして波打ちます。モータの回転が規定値以上になったことを検出して減速(駆動電流を減らす)制御を行いますが、モータの回転子には質量があるので直ぐには反応しません。A点で減速を開始してもモータの回転は少しの間、上がり続けます。B点でも、まだ、規定値以上なので減速制御が行われます。今回の制御プログラムでは規定値以上の場合、各周期で制御値はより多くなります。A点の減速動作させる値よりB点での減速値のほうが大きくなります。ですから、B点以降ではより強く減速されます。そのため、規定値を下回っても下がり続けます。C点で回転数が規定値以下であることを検出して加速を開始します。減速時と同様に各周期毎により強く加速されます。 以上のような動作を繰り返し、モータの回転数は一定になりません。 速度検出周期を短くすると回転ムラは顕著に現れます。  制御値が小さい場合、無負荷には安定した回転制御をさせることができます。しかし、モータに負荷がかかり回転数が下がった後、規定の回転数に戻るまでの時間がかかります。負荷の変動量にもよりますが、制御値が小さすぎるとモータの回転数を一定に保つことが難しくなります。  速度検出周期を短くすれば細やかな制御ができると思いがちですが、そうではありません。ただし、この関係は今回の制御回路の場合で、他の制御方式の場合には当てはまりません。 今回の制御回路では周期毎に減速値、加速値を増加させています。モータの回転子の質量により制御電流を変えても直ぐには回転速度が変わらない場合があります。その場合、速度検出周期が短いと制御値が大きくなりモータへの電流制御が大きく振れてしまい、回転数の変動が大きくなってしまいます。 検出周期を長くすると制御電流の変動幅は小さくなり、回転数の変動を小さくすることができます。 しかし、検出周期を長くするとモータにかかる負荷が変動した場合の制御能力が低下するので極端に長くしないほうがよいです。 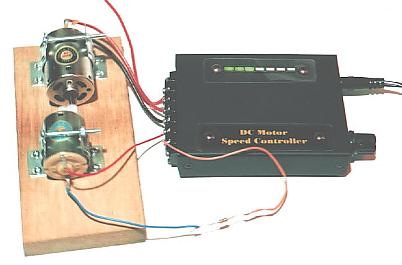 モータと制御装置を結線した後電源を投入しますが、できたら最初にモータの電源を投入し、次に制御回路の電源を投入します。モータと制御回路の電源が同じ場合にはしかたがありません。 最初に制御回路の電源を投入すると速度検出回路に電圧がかからないため、制御回路は制御電流を増大させ、最終的には最大制御電流状態になります。この状態でモータの電源を入れると最初最大電流で駆動されるので、勢いよく回転し始め次第に規定速度になるという動作をします。要は最初にビューンとモータが回り始めてしまうということです。これを気にしなければ電源投入順番を意識する必要はありません。 上記のように使用するモータの特性、速度検出回路の特性により制御パラメータを調整する必要があります。正直、結構、面倒です。
CCPR2H と CCP2L レジスタの値で調整します。
speed の値で調整します。 可変抵抗器で調整する速度範囲を変えるためにはR12の値を変更する必要があります。
change の値で調整します。 これらの値は使用するモータおよび検出回路により変わりますので、いろいろと試してみてください。 |